全国统一服务热线
136-1515-5909
全国统一服务热线
136-1515-5909

江苏省盐城市亭湖区新洋街道大寨河路18号


传真:0515-88522622
————网址:www.tailoredtoursofireland.com
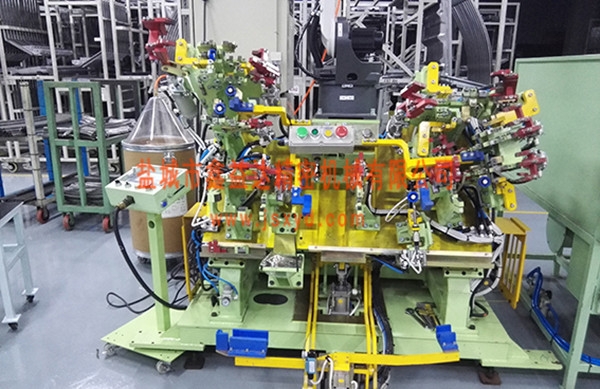
在科技高速发展的今天,焊接夹具在工业生产中也得到了广泛的应用,为了适应工业中焊接产品的需求,机器人焊接工装夹具就此应运而生。前面已经分享了机器人焊接工装夹具的设计要求,下面就来介绍机器人焊接工装夹具与普通焊接夹具相比较的特点。
(1)机器人焊接工装夹具应尽量采用气缸压紧,且需配置带磁性开关的气缸。以便将压紧信号传递给机器人控制系统。与普通焊接夹具不同,机器人焊接工装夹具除正面可以施焊外,其反面也能够对工件进行焊接。
(2)焊接工装夹具有足够的装配、焊接空间,不影响焊接操作和焊工观察,不妨碍焊件的装卸。所有的定位元件和夹紧机构应与焊道保持适当的距离,或者布置在焊件的下方或侧面。夹紧机构的执行元件能够伸缩或转位。
(3)零件的定位精度要求更高,焊缝相对位置精度要求较高,应≤1mm。机器人焊接工装夹具前后工序的定位须一致。由于变位机的变位角度较大,机器人焊接工装夹具尽量避免使用活动手动插销。
(4)由于焊件一般由多个简单零件组焊而成,而这些零件的装配和定位焊,在焊接工装夹具上是按顺序进行的;因此,它们的定位和夹紧是一个个单独进行的。
136-1515-5909
手机网站

微信客服
 在线咨询
在线咨询